
[tps_title]The Flight Software[/tps_title]
As soon as the conditions were met, many enthusiasts proposed different solutions for the flight software, that was later developed also thanks to the contribution of the Internet community; we will briefly see the story of these applications, that started some years ago now. In the beginning there was Ardupilot for ATmega328P, which evolved in Ardupilotmega for ATmega2560 (abbreviated as APM) and that we used for an autonomous aircraft project in March 2011. In the beginning they were little more than shields based on Arduino, to which the IMU was added, but later they became complete boards (AIO all in one), completely independent from Arduino boards.
The project considers different pieces of software and hardware, depending on the fact that you might want to control multicopters, airplanes or cars; even the Arducopter project, that started at about the same period, was finally absorbed by Ardupilot in 2013. Despite the evolution (specially from the commercial point of view), it is still an open source project (but with some limitations) and therefore both the hardware diagrams and the software sources are available; moreover the software to be loaded on the board and the Mission Planner – a navigation planning software – are available. The firmware for the board is a complex one as regards the installation, since it has many additional libraries for which the whole Arduino IDE (a modified one) is downloaded, along with various related dependencies for a total of 90 MB.
MegapirateNG is a “branch” of the APN project and it has been thought so to run on different platforms: it is completely OpenSource and compatible with APM.
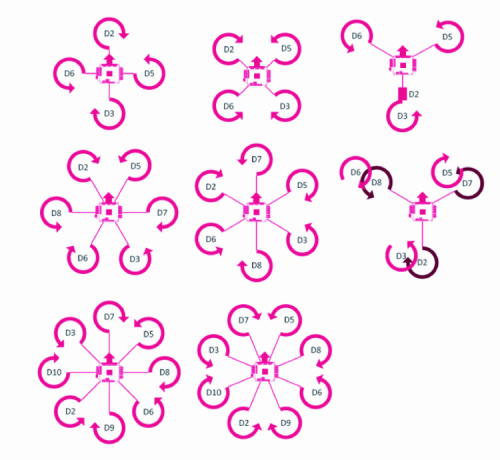
The firmware running inside the board is not among the simplest ones: in addition to the flight stabilization there is the management of alarms, of telemetry, of position and much more, for such a reason we preferred to use an already existing software, named MultiWii, that is a completely open source one and that was developed in the last years, also thanks to the contribution of the enthusiasts in the Internet. It enables the control of multicopters, helicopters and aircrafts.
The project was born with the usage of a Nintendo Wii Motion Plus gyroscope (the cheapeast and easiest to find at the time) and an Arduino mini pro board, but now it supports a great number of sensors and boards. The firmware is a very light one and may run on a small Atmega 328, but with all the functions activated (navigation and GPS) it is necessary to use an Atmega 2560. The software is managed in the site. By downloading the software package you will have the software for Arduino and the GUI available, it is written in Processing and meant to be run on a PC, so to manage the settings and the telemetry. The software for Arduino uses only system libraries and therefore its usage is an immediate one, having only Arduino IDE available. In order to configure the board and use the telemetry and the mission planning, the WinGui software is also available, as well as an application for Android smartphones.
Since the MultiWii project is a completely open source one, the control board’s circuit diagrams and all the information concerning its usage are easily available. The full possibility of configuring the software allows to adapt it to the various boards that are already assembled and ready-to-use, as proposed by other subjects. In this article we present our experience in creating a class 450 quadcopter (the distance from engine to engine is 45 cm) and we will describe all the stages concerning the creation and the activation, in the simplest and clearest way possible, even though the project is complicated in itself, given that it involves different aspects of mechanics, electronics and information technology.
UP NEXT:











